- الیکٹرانک یونیورسل ٹیسٹنگ مشین
- ہائیڈرولک یونیورسل ٹیسٹنگ مشین
-
افقی ٹینسیل ٹیسٹنگ مشین
- سٹیل تار ٹیسٹنگ مشین
- متحرک تھکاوٹ ٹیسٹ کا نظام
-
روبوٹ خود کار طریقے سے ٹیسٹنگ سسٹم
- اثر ٹیسٹنگ مشین سیریز
- کمپریشن ٹیسٹنگ مشین
- ٹورسن ٹیسٹنگ مشین
- موڑنے والی ٹیسٹنگ مشین
-
کریپ ٹوٹنے کی جانچ کی مشین
-
Erichsen کپنگ ٹیسٹنگ مشین
-
لچکدار بیئرنگ ٹیسٹنگ مشین
- بہار ٹیسٹنگ مشین
-
موصلیت ٹیسٹنگ مشین
- میٹالوگرافک
- سختی ٹیسٹر
- خوردبین سکوپی
-
پلاسٹک پائپ اور ربڑ ٹیسٹ مشین
- بہاؤ انڈیکس ٹیسٹر پگھلنے
- ایچ ڈی ٹی اور ویکیٹ نرم پوائنٹ درجہ حرارت ٹیسٹر
- پینڈولم اثر ٹیسٹر
- ہائیڈروسٹیٹیٹ پریشر ٹیسٹر
- پلاسٹک پائپ انگوٹی سختی ٹیسٹر
- متفرق سکیننگ کیلوریمیٹر
- نمی میٹر
- کثافت ٹیسٹر
- راھ مواد ٹیسٹر
- گرنے والے بڑے پیمانے پر اثر ٹیسٹنگ مشین
- میتیلین کلورائڈ سوک ٹیسٹر
- شعلہ مزاحمت ٹیسٹر
- گھسائی کرنے والی مشینیں
- ربڑ کی صنعت کی جانچ کا سامان
- ماحولیاتی دھات ٹیسٹ چیمبر
- دانشورانہ مصنوعات
- آپٹیکل سپیکٹرومیٹر
-
دیگر ٹیسٹنگ کا سامان
- ماسک اور حفاظتی احاطہ ٹیسٹ کا سامان
- اعلی اور کم درجہ حرارت ٹیسٹ چیمبر
- این ڈی ٹی آلات سیریز
- بصری پیمائش مشین
- آپٹیکل پروفائل پروجیکٹر
- ماپنے کی مشین کو منظم کریں
- کاغذ اور پیکیج ٹیسٹ ٹیسٹر
- ٹیکسٹائل ٹیسٹ ٹیسٹر
- آپٹیکل ٹیسٹ مشین
- بولٹ ٹیسٹنگ کا سامان
- رگڑ اور جانچ کی مشین پہننا
- وولٹیج ٹوٹنے ٹیسٹر
- ٹوکری رومیٹر
- کیپلی رومیٹر
- پلاسٹک رگڑ اور پہننے والی ٹیسٹ مشین
- ٹیسٹ مشین لوازمات
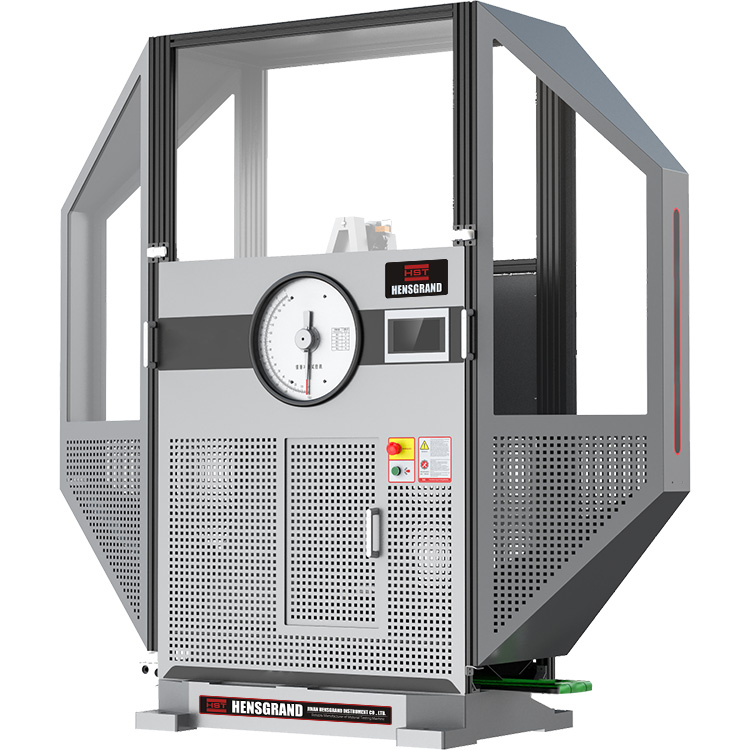
Jbw-c کمپیوٹر کنٹرول چارپی اثر ٹیسٹر (300J ~ 750J)
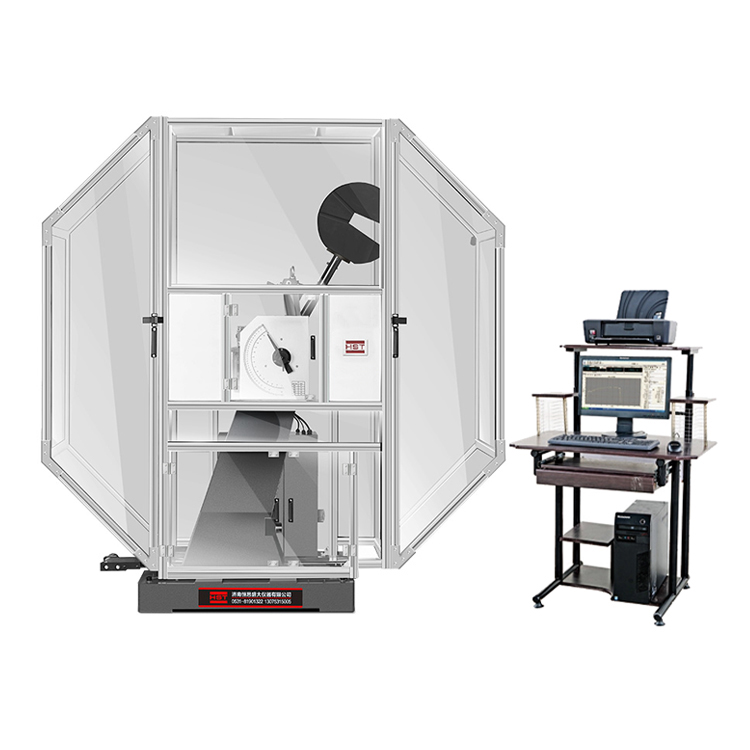
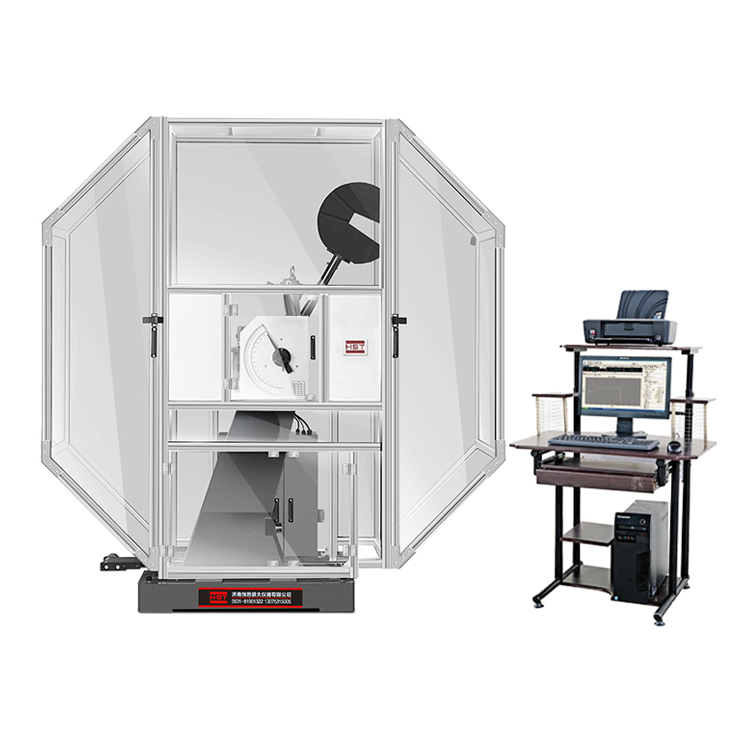
درخواست: Jbw-c charpy اثر ٹیسٹنگ مشین بنیادی طور پر دھات کے مواد کے اثرات جذب توانائی اور اثر جراثیمی کی پیمائش کے لئے استعمال کیا جاتا ہے. فوائد 1. مرکزی فریم اور بنیاد انضمام، اچھی سختی اور اعلی استحکام ہے۔ 2. راؤنڈ پینڈولم منی کے لیے ہوا کی مزاحمت کرتا ہے۔ اثر چاقو کمپریشن اور انسٹال کے لئے پچر بلاک کا استعمال کرتا ہے. یہ تبادلہ کرنا آسان ہے۔ 3.معطلی پینڈولم آلہ ہائیڈرولک بفر کو اپنایا ہے تاکہ نقصان سے بچنے اور پینڈولم پھانسی کے وقت کم شور سے بچنے کے لۓ. یہ سروس کی زندگی کو بڑھاتا ہے اور حفاظت کو بہتر بناتا ہے۔ 4. نقل و حمل کے لئے کمی کا استعمال کرتا ہے. اس کی ساخت سادہ، انسٹال اور برقرار رکھنے کے لئے آسان، طویل سروس کی زندگی اور کم خرابی کی شرح ہے. 5. اس میں نمونے ری سائیکلنگ ڈیوائس ہے۔ آلہ ٹیسٹنگ مشین سے ٹوٹے ہوئے نمونے کو اثر کے بعد آؤٹ پٹ کرتا ہے تاکہ ٹیسٹر سے ٹیسٹنگ مشین سے ٹوٹے ہوئے نمونے کو ری سائیکل کرنے سے بچنے اور کارکردگی اور حفاظت کو بہتر بنایا جا سکے۔ 6. اس میں ٹوٹے ہوئے نمونے سے بچنے کے لیے مکمل طور پر بند حفاظتی نیٹ ہے اور ٹیسٹر ٹیسٹ پروسیسنگ کرتے وقت ٹیسٹ مشین سے رابطہ کرنے کے لیے ٹیسٹر اور سامان کو محفوظ بنانے کے لیے ٹیسٹر ہے۔ معیار ISO148، EN10045، ASTM E23، GB/T3808-2002، GB/T229-2007۔ وضاحت ماڈل جے بیڈبلیو-300 سی جے بیڈبلیو-450 سی جے بیڈبلیو-600 سی جے بیڈبلیو-750C زیادہ سے زیادہ اثر توانائی (J) 300 450 600 750 پینڈولم ٹوکری (ن · میٹر) میٹر = 80.3848 میٹر = 160.7695 میٹر = 241.1543 میٹر = 321.5390 اٹھایا زاویہ (ملی میٹر) 150°±1° سپورٹ محور سے ٹکری کے مرکز تک فاصلہ (ملی میٹر) 750 اثر کی رفتار (m/s) 5.24 معیاری مدت (ملی میٹر) 40 جبڑے کا راؤنڈ زاویہ R (1.0 ~ 1.5) ملی میٹر (1 ملی میٹر خاص طور پر آرڈر کیا گیا ہے۔) سپورٹ ٹاپ زاویہ 11°±1° ہڑتال ٹپ کا زاویہ 30°±1° ہڑتال کی موٹائی (ملی میٹر) 16 سپورٹ جبڑے کا گول کونے R (1.0 ~ 1.5) ملی میٹر (1 ملی میٹر خاص طور پر آرڈر کیا گیا ہے۔) بلیڈ کی وکر ریڈیو R (2.0 ~ 2.5) ملی میٹر (8 ملی میٹر خاص طور پر آرڈر کیا گیا ہے۔) معیاری نمونہ طول و عرض (ملی میٹر) 55x10x10، 55x10x7.5، 55x10x5 بجلی کی فراہمی 3phs، 380V/220V ± 10٪، vac50hz یا مخصوص طول و عرض (ملی میٹر) مجموعی وزن (کلو)
ایک پیغام چھوڑیں
آپ ای میل کے ذریعے مجھ سے بھی رابطہ کرسکتے ہیں. میرا ای میل ایڈریس ہے admin@hssdtest.com